

中国空间站航天员首次出舱 “西安造”助力漫步太空


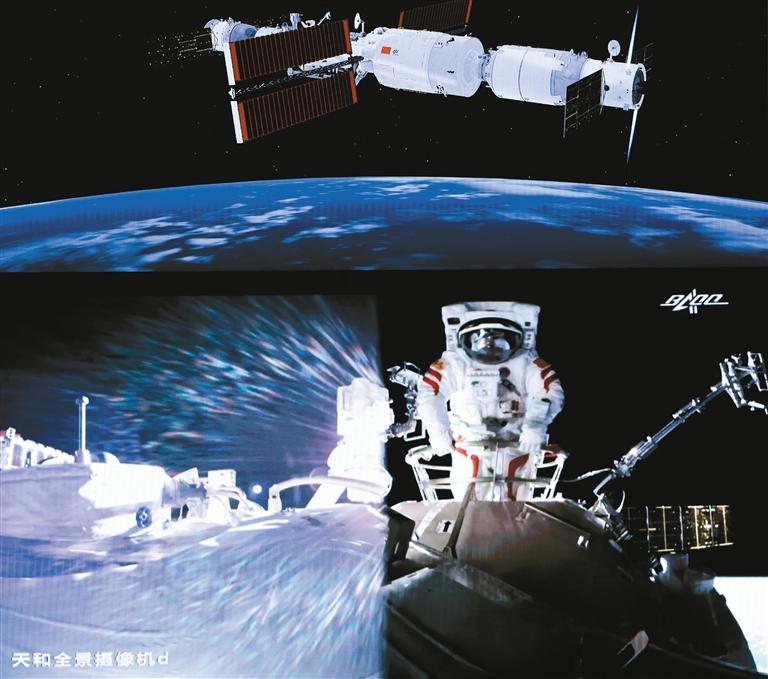
7月4日,在北京航天飞行控制中心大屏拍摄的航天员刘伯明出舱场面。 (新华社记者 金立旺 摄)
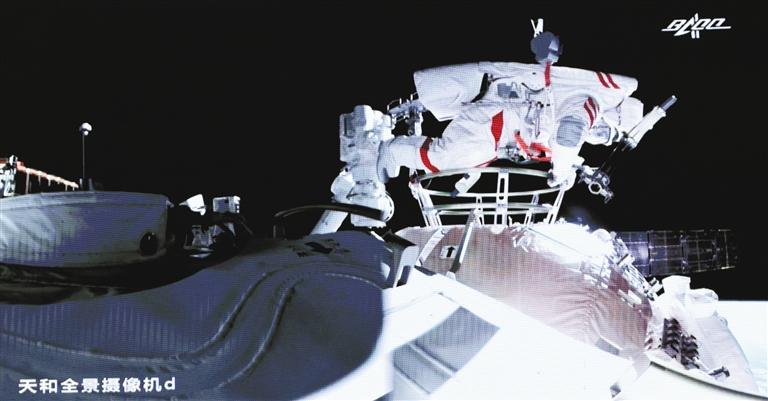
7月4日,在北京航天飞行控制中心大屏拍摄的航天员刘伯明在舱外工作场面。 (新华社记者 金立旺 摄)

7月4日,在北京航天飞行控制中心大屏拍摄的舱内航天员聂海胜配合支持两名出舱航天员开展舱外操作。 (新华社记者 金立旺 摄)
原标题:中国空间站航天员首次出舱 “西安造”助力漫步太空
关颖
据中国载人航天工程办公室消息,北京时间2021年7月4日14时57分,经过约7小时的出舱活动,神舟十二号航天员乘组密切协同,圆满完成出舱活动期间全部既定任务,航天员刘伯明、汤洪波安全返回天和核心舱,标志着我国空间站阶段航天员首次出舱活动取得圆满成功。
这是继2008年神舟七号载人飞行任务后,中国航天员再次实施的空间出舱活动,也是空间站阶段中国航天员的首次空间出舱活动。
西安力量
航天四院科技产品
护卫航天员安全出舱
本报讯 7月4日,神舟十二号航天员聂海胜、刘伯明、汤洪波进行中国空间站首次出舱活动。此次任务中,航天员身着国产舱外航天服出舱活动,航天四院42所承担了舱外航天服上所有橡胶件的研制与生产。
航天员身着舱外航天服出舱活动,俨然就是一个在空间运行的小卫星,必须具备独立的运行系统,能保证航天员的气、液、电供给,保证其生存、工作和通信。舱外航天服气压调节是关键,更不能出现一丝漏气。
由航天四院42所为航天员量身定制的舱外航天服橡胶件主要包括三类产品,分别是舱外航天服主气密层、手套橡胶件、连接处密封件。主气密层涉及肩、肘、臀、膝、踝等多个活动关节,能够为航天员在太空超低温条件下灵活出舱活动提供必要的基础防护;手套橡胶件是航天员舱外航天服手套的重要部件,能够为航天员进行舱外作业时提供灵活操作功能和必要的防护;连接处密封件能够耐受空间环境,既确保密封严丝合缝,又确保了航天服关节灵活自如。
该系列橡胶件具有高强度、高抗撕、耐高低温交变等性能,空间环境适应性良好,所采用材料无毒、无污染,各项空间环境耐受性能均达到国外同类材料水平,满足空间飞行器卫生学标准的要求。
西安硬科技产品
保障此次天地通信
本报讯 7月4日,神舟十二号航天员进行中国空间站首次出舱活动。出舱活动时与地面建立高速及时的测控通信尤为重要,西安的硬科技产品为此次天地通信进行了全程保障。
出舱后,航天员将面临太空严峻的空间环境考验,容不得半点差错。因此,进行出舱活动时与地面建立高速及时的测控通信尤为重要。那么,地面测控通信是如何全程支持保障出舱活动的呢?要确保航天员与地面测控通信的实时畅通,就必须依靠航天科技集团五院西安分院研制的第三代中继终端产品。它通过与中继卫星天链一号和天链二号建立中继链路,实现中继通信。这就好比在太空中搭建了地面与中继卫星、中继卫星与航天员之间的“天路”。这对于保证地面与航天员的持续通信发挥着重要作用。在此次任务中,航天员要实现在太空三个月的长时间驻留,并进行多次出舱活动,这也是对中继终端通信测控能力的一大考验。
空间站天和核心舱的中继终端与其他型号在设计上最大的区别在于,为了保证在轨使用的长寿命,需要具备在轨可维修性。航天员的一项常态活动就是出舱,并开展舱外维修、设备更换等操作。空间站天和核心舱的中继终端采用了集成化、模块化的设计思路,在保证传输信号质量的同时,方便航天员维修更换。这对于之前的设计而言可谓一大突破。
虽然在前期设计生产阶段,研制团队已经为了可维修性修改了大量设计,但为了保障中继终端的高可靠性,在空间站天和核心舱发射前,航天五院西安分院的研制人员已经在地面的真空试验环境对中继终端关键部件做了为期一年的加速寿命实验,模拟在轨长期运行状态,充分保证中继终端在轨使用万无一失。
太空出舱活动,不仅是对航天员的全方位考验,也是对空间站天和核心舱与地面测控站间通信能力的一大考验。西安分院中继终端研制团队为航天员的每次出舱活动的通信全程保驾护航,为航天员与祖国母亲传递佳音。
西安制造 让“中国臂”炫舞太空
本报讯 此次长征五号B遥二运载火箭搭载的空间站天和核心舱配备了一条强大的机械臂——天和机械臂,主要承担着舱段转位、悬停飞行器捕获和辅助对接、舱外货物搬运、航天员出舱活动、舱外状态检查以及空间环境试验平台照料等重要任务。7月4日,在航天员出舱任务中,机械臂表现完美。西安制造六维力传感器,让有了精准“触觉神经”的“中国臂”炫舞太空。
此次,航天四院44所自主研制的末端执行器六维力传感器、一维力传感器和关节一维力矩传感器三款传感器产品作为天和机械臂重要的传感测量元件,为这条“中国臂”在太空的自由炫舞提供了坚强保障。
六维力传感器是三款传感器中结构最为复杂、研制难度最大的一款,它被应用在机械臂主传力路径上,串联于末端执行器和腕部关节之间,能够同时测量三个方向上的力分量和转动时的力矩分量;一维力传感器主要负责机械臂末端执行器在实施目标抓取和拖动功能时,对拖动力进行监测;关节一维力矩传感器则用于感知机械臂关节转动时所承载的力矩,实现整臂的柔顺控制。
三款传感器产品作为机械臂进行伸缩、扭转、抓握和拖动等动作时各关键部位的测力元件,就像机械臂的“触觉神经”,能够实时将力学参量反馈至机械臂的“大脑”,为机械臂实现精准控制提供重要依据,使机械臂具备强大的自由运动能力。 本版稿件除署名外由记者 关颖采写



